5. Collegamento di prodotti supportati non appartenenti a Victron
5.1. Collegamento di un Inverter fotovoltaico
La misurazione dell’uscita di un Inverter FV fornirà all’utente una panoramica sia dell’attuale bilanciamento della potenza che della distribuzione dell’energia. Tenere presente che tali misurazioni sono utilizzate solo per visualizzare informazioni. Non sono necessarie, né sono utilizzate, dall’impianto per le sue prestazioni. Oltre a monitorare, il dispositivo GX può anche limitare alcuni tipi e marche di Inverter FV, ad es., riducendo la loro potenza in uscita. Ciò si utilizza, ed è necessario, per la funzione Alimentazione zero o limitata dell’ESS.
Connessioni dirette
Tipo | Senza alimentazione | Dettagli |
|---|---|---|
Fronius | Sì | Connessione LAN, vedere GX, GX - Manuale Fronius |
SMA | No | Connessione LAN, vedere GX, GX - Manuale SMA |
SolarEdge | No | Connessione LAN, vedere GX, GX - Manuale SolarEdge |
ABB | Sì | Connessione LAN, vedere GX, GX - Manuale ABB |
Utilizzo di un contatore
Per gli Inverter FV che non possono essere interfacciati digitalmente, si può utilizzare un contatore:
Tipo | Senza alimentazione | Dettagli |
|---|---|---|
No | Collegato all’ingresso analogico dell’inverter/caricabatterie. Costo inferiore, meno preciso. Contatore di energia | |
No | Cablato al Cerbo GX o collegato senza cavi, tramite i nostri convertitori Zigbee a USB/RS485. Vedere la pagina d’inizio dei Contatori di Energia | |
Sensori CA wireless | No | Vedere il manuale del Sensore Wireless CA, Prodotto fuori produzione |
5.2. Collegamento di un GPS USB
Utilizzare un GPS per rintracciare da remoto veicoli o natanti, tramite il Portale VRM. È anche possibile configurare una Recinzione geografica, che invia automaticamente un allarme quando il sistema abbandona l’area designata. È possibile scaricare i file gps-tracks.kml per aprirli, ad esempio, in Navlink e Google Earth.
Victron non vende moduli USB-GPS, ma il Cerbo GX supporta moduli GPS di terze parti, i quali utilizzano quasi tutti l’impostazione di comando NMEA0183. Può comunicare alle velocità di trasmissione di 4800 e 38400 baud. Collegare l’unità a una qualsiasi delle prese USB. La connessione potrebbe richiedere alcuni minuti, ma il Cerbo GX riconoscerà automaticamente il GPS. La localizzazione dell’unità sarà automaticamente inviata al portale online VRM e la sua posizione apparirà sulla mappa.
Il Cerbo GX è stato collaudato per la compatibilità con:
Globalsat BU353-W SiRF STAR III 4800 baud
Globalsat ND100 SiRF STAR III 38400 baud
Globalsat BU353S4 SiRF STAR IV 4800 baud
Globalsat MR350 + BR305US SiRF STAR III 4800 baud
5.3. Collegamento di un GPS NMEA 2000
Invece di un GPS USB, è possibile utilizzare un GPS NMEA 2000 per la localizzazione remota di veicoli o imbarcazioni nel portale VRM.
Il trasmettitore GPS della ditta esterna NMEA 2000 deve soddisfare i seguenti requisiti:
La classe del dispositivo NMEA 2000 deve essere 60, Navigazione.
La funzione del dispositivo NMEA 2000 deve essere 145, Posizione Proprio Natante (GNSS).
La posizione (latitudine, longitudine) deve essere trasmessa in PGN 129025.
L’altitudine, che è opzionale, deve essere trasmessa in PGN 129029.
Rotta e velocità (entrambe opzionali) devono essere trasmesse in PGN 129026.
La maggior parte dei GPS NMEA 2000 è compatibile. La compatibilità è stata testata mediante:
Garmin GPS 19X NMEA 2000
Per collegare una rete NMEA 2000 alla porta VE.Can del dispositivo GX, entrambe con connettori di tipo diverso, esistono due soluzioni:
Il cavo VE.Can a NMEA 2000. Inserendo o meno il fusibile, permette anche di alimentare o meno la rete NMEA 2000 tramite apparecchiature Victron. Tenere presente la seguente avvertenza.
L’Adattatore VE.Can 3802 di OSUKL. Il suo vantaggio è che si presta bene a collegare un solo dispositivo NMEA 2000, come un trasmettitore del serbatoio, a una rete VE.Can. Può anche alimentare una rete NMEA 2000 con una tensione inferiore, direttamente da un sistema Victron a 48 V.
Avvisi e soluzioni per sistemi a 24 V e 48 V
Mentre tutti i componenti Victron accettano fino a 70 V in ingresso per le loro connessioni CAN-bus, alcune apparecchiature NMEA 2000 non accettano tale ingresso e richiedono una connessione NMEA 2000 alimentata a 12 V che a volte arriva fino a 30 o 36 V. Assicurarsi di leggere le schede tecniche di tutte le apparecchiature NMEA 2000 utilizzate. Se il sistema contiene una NMEA 2000 che richiede una tensione di rete inferiore a quella della batteria, consultare l'adattatore 3802 VE.Can di OSUKL già menzionato o, in alternativa, installare il cavo VE.Can a NMEA 2000 senza fusibile e fornire un'alimentazione adeguata alla rete NMEA 2000 utilizzando, ad esempio, un cavo adattatore di alimentazione NMEA 2000, non fornito da Victron. La porta VE.Can del dispositivo GX non necessita di alimentazione esterna per funzionare.
5.4. Collegamento di un Generatore Fischer Panda
Per informazioni dettagliate, vedere qui .
5.5. Collegamento dei sensori di livello del serbatoio agli ingressi serbatoio del GX
Gli ingressi del sensore di livello del serbatoio sono resistivi e devono essere collegati a un trasmettitore del serbatoio resistivo. Victron non fornisce trasmettitori del serbatoio. Le connessioni del sensore del serbatoio integrato non supportano i sensori di tipo mA o 0-5 V, i quali richiedono accessori aggiuntivi oppure di essere sostituiti con un sensore di tipo resistivo.

I sensori si attivano (e disattivano) nel menù I/O (Impostazioni→ I/O→ Ingressi analogici) delle impostazioni del dispositivo GX. Una volta attivo, il serbatoio appare nell’Elenco dispositivi assieme alle opzioni per personalizzare la configurazione in base all'impianto specifico.
 |  |
Impostare l’unità di volume (metri cubici, litri, gallone imperiale o USA) e di capacità del serbatoio. È anche possibile configurare forme personalizzate per i serbatoi non lineari, per i quali sono disponibili fino a 10 varianti: ad es., 50 % del sensore equivale a 50 % del volume e 75 % del sensore equivale a 90 % del volume.
 |  |
Ogni porta del livello del serbatoio può essere configurata per funzionare con trasmettitori del serbatoio europei (0 - 180 Ohm) o statunitensi (240 - 30 Ohm), oppure per configurare un intervallo di resistenze personalizzato compreso fra 0 Ohm e 300 Ohm (richiede il firmware v2.80 o superiore).
È possibile impostare il tipo di fluido del serbatoio su Carburante, Acqua dolce, Acque reflue, Vivaio, Olio, Acque nere (fognature), Benzina, Diesel GPL, GNL, Olio idraulico e Acque non depurate e impostare anche un nome personalizzato.
 |  |
È possibile impostare e attivare un allarme di basso o alto livello separato per ciascun sensore del serbatoio.
 |  |
I dati del livello del serbatoio sono inviati al Portale VRM, appaiono sui display di monitoraggio della barca e del camper (se collegati e attivati) e si possono usare per attivare il relè quando è impostato su "Pompa serbatoio". I livelli del serbatoio possono essere monitorati anche in diverse altre ubicazioni dell'ambiente GX:
Elenco dispositivi del dispositivo GX
Menù di panoramica del sensore del dispositivo GX
Panoramica grafica del dispositivo GX
Dashboard del VRM
Widget del menù avanzato del VRM
Widget dell'app VRM
 |  |
Per fissare fisicamente le sonde del serbatoio, è necessario inserire una ghiera o un cavo di rame spellato di almeno 10 mm o più nel connettore della morsettiera rimovibile. Dopo averle fissate correttamente, utilizzare la linguetta arancione per rimuovere il cavo fissato.
5.6. Incremento del numero di ingressi del serbatoio mediante l'utilizzo di più dispositivi GX
5.6.1. Introduzione
Il numero di ingressi del serbatoio di un dispositivo GX, come il Cerbo GX e il Venus GX, può essere ampliato collegando più dispositivi GX in una rete VE.Can. A tal fine, un dispositivo GX deve essere designato come "principale" e gli altri come "secondari". A continuazione si spiega come eseguire tale operazione.
Non esiste un limite pratico al numero di dispositivi GX che si possono utilizzare, tranne per il numero di indirizzi sorgente disponibili in una rete VE.Can, che possono essere 252. Ad esempio, un Cerbo GX con 4 ingressi serbatoio utilizza fino a 5 indirizzi: uno per sé e uno per ciascun ingresso serbatoio.
5.6.2. Requisiti
Attivare le impostazioni MQTT (parte dell'integrazione App MFD) su un solo dispositivo GX, non sugli altri.
Collegare alla rete Ethernet solo il dispositivo GX principale, senza collegare gli altri. L'App MFD degli MFD marittimi non è progettata per funzionare con più dispositivi GX in una rete Ethernet.
Se si utilizza il protocollo Modbus TCP: Attivare il Modbus TCP su un solo dispositivo GX.
Collegare al VRM solo il dispositivo GX principale, che trasmetterà anche i livelli dei serbatoi ricevuti dalle unità secondarie.
Raccomandiamo di collegare tutti i prodotti VE.Bus e VE.Direct al dispositivo GX principale. La connessione tramite un dispositivo secondario funziona, ma ha delle limitazioni. Ad esempio, non funzionano la configurazione da remoto, il controllo DVCC e nemmeno gli aggiornamenti da remoto del firmware. L'ampliamento delle porte VE.Direct tramite USB garantisce la piena funzionalità ed è quindi il metodo consigliato. Per ulteriori informazioni a questo riguardo, consultare il capitolo Alimentazione del Cerbo GX.
5.6.3. Configurazione passo-passo
Innanzitutto, configurare tutti gli ingressi del serbatoio di tutti i dispositivi GX in Impostazioni → I/O → Ingressi analogici, attivando solo gli ingressi in uso e disattivando gli altri.
In Elenco dispositivi → Ingresso serbatoio → Dispositivo → Nome, assegnare a ciascun ingresso serbatoio un nome univoco, ad esempio Acqua dolce 1, Acqua grigia SB, Porta diesel e così via.
Questo è l'unico modo per assicurarsi che siano distinguibili quando si collegano tutti assieme.
Collegare ogni dispositivo GX alla sua porta VE.Can e assicurarsi di terminare entrambe le estremità.
Non è necessario alimentare la rete VE.Can esternamente: i dispositivi GX non alimentano la rete VE.Can, ma alimentano il proprio circuito CAN interno.
Ora, per ciascun dispositivo GX, entrare in Impostazioni → Servizi → VE.Can e lì:
Verificare che il profilo scelto sia VE.Can e Lynx Ion BMS (250 kbit/s) o VE.Can e CAN-bus BMS (250 kbit/s)
Attivare la funzione NMEA 2000-out su tutti i dispositivi GX
Assegnazione di un numero univoco a ciascun dispositivo GX
Utilizzare la funzione test Verifica numeri identificativi univoci per assicurarsi di aver fatto tutto correttamente


Infine, verificare che tutti i sensori del dispositivo GX principale siano visualizzati nell'Elenco dispositivi e funzionino correttamente.
5.7. Collegamento di trasmettitori del serbatoio NMEA 2000 di terze parti
Un trasmettitore del serbatoio NMEA 2000 di terze parti deve soddisfare i seguenti requisiti per essere visibile sul dispositivo GX:
Trasmettere il Livello del Fluido NMEA 2000, 127505
La classe del dispositivo NMEA 2000 deve essere Generale (80), combinata con il codice funzione Tasduttore (190), oppure Sensore (170). Oppure la classe del dispositivo NMEA 2000 deve essere Sensore (75), combinata con la funzione Livello Fluido (150).
Attualmente non è supportata una sola funzione che riporti vari Livelli Fluido.
Per alcuni trasmettitori del serbatoio è anche possibile configurare la capacità e il tipo di fluido nei menu del dispositivo GX, per esempio il Maretron TLA100. Questa struttura può essere disponibile con altri trasmettitori di altri produttori, vale la pena provare.
Trasmettitori del serbatoio NMEA 2000 compatibili testati:
Maretron TLA100
Maretron TLM100
Numero pezzo Sensore Livello Fluido Navico Fuel-0 PK 000-11518-001. Si noti che è necessario un display Navico per configurare la capacità, il tipo di fluido e altri parametri del sensore. Vedere l'avviso di tensione qui sotto.
Oceanic Systems (UK) Ltd (OSUKL) - 3271 Trasmettitore del serbatoio volumetrico Nel caso in cui non dovesse funzionare, necessiterà di un aggiornamento del firmware. Per farlo, contattare OSUKL. Vedere l'avviso di tensione qui sotto.
Oceanic Systems UK Ltd (OSUKL) - 3281 Trasmettitore del livello dell’acqua Vedere l'avviso di tensione qui sotto.
Molto probabilmente ne funzionano anche altri. Se ne conoscete uno che funziona bene, contattateci su Community -> Modifiche.
Per collegare una rete NMEA 2000 alla porta VE.Can del dispositivo GX, che hanno entrambe connettori diversi, esistono due soluzioni:
Il cavo VE.Can a NMEA 2000. Inserendo o meno il fusibile, permette di alimentare o meno la rete NMEA 2000 con apparecchiature Victron. Tenere presente la seguente avvertenza.
L’Adattatore VE.Can 3802 di OSUKL. Il suo vantaggio è che si presta bene a collegare un solo dispositivo NMEA 2000, come un trasmettitore del serbatoio, a una rete VE.Can. Può anche alimentare una rete NMEA 2000 con una tensione inferiore, direttamente da un sistema Victron a 48 V.
Avvisi e soluzioni per sistemi a 24 V e 48 V
Mentre tutti i componenti Victron accettano fino a 70 V in ingresso per le loro connessioni CAN-bus, alcune apparecchiature NMEA 2000 non accettano tale ingresso e richiedono una connessione NMEA 2000 alimentata a 12 V che a volte arriva fino a 30 o 36 V. Assicurarsi di leggere le schede tecniche di tutte le apparecchiature NMEA 2000 utilizzate. Se il sistema contiene una NMEA 2000 che richiede una tensione di rete inferiore a quella della batteria, consultare l'adattatore 3802 VE.Can di OSUKL già menzionato o, in alternativa, installare il cavo VE.Can a NMEA 2000 senza fusibile e fornire un'alimentazione adeguata alla rete NMEA 2000 utilizzando, ad esempio, un cavo adattatore di alimentazione NMEA 2000, non fornito da Victron. La porta VE.Can del dispositivo GX non necessita di alimentazione esterna per funzionare.
5.8. Sensori Bluetooth a ultrasuoni Mopeka
È stato aggiunto il supporto del sensore Mopeka al Venus OS. Questi sensori a ultrasuoni utilizzano la BLE (Bluetooth Low Energy - Bassa energia Bluetooth), una tecnologia wireless che consente di collegare in rete i dispositivi entro un raggio di circa 10 metri, consumando una quantità di energia significativamente inferiore rispetto alla normale tecnologia Bluetooth.
I sensori Mopeka sono dotati di rilevamento a ultrasuoni per serbatoi pressurizzati, non pressurizzati e per diversi prodotti relativi ai serbatoi. A seconda del modello, i sensori sono fissati sul fondo o sulla parte superiore del serbatoio. Il livello del liquido, la temperatura e la tensione della batteria del sensore vengono trasmessi in modalità wireless al dispositivo GX.
Sensori Mopeka compatibili
Sensore Mopeka | Osservazioni |
|---|---|
Mopeka Pro Check H2O | |
Mopeka Pro Check GPL | |
Mopeka Pro Check Universal | Richiede almeno Venus OS v3.14 |
Mopeka TD40 / TD 200 | |
Mopeka Pro Plus | |
Mopeka Pro 200 |
Nota
Sono supportati solo i sensori sopra elencati. Altri sensori Mopeka, anche se dotati di Bluetooth, non sono supportati.
Per collegare i sensori Mopeka al dispositivo GX tramite Bluetooth, il dispositivo GX deve essere dotato di funzionalità Bluetooth. Alcuni prodotti GX sono già dotati di Bluetooth integrato, mentre per tutti gli altri si può facilmente installare tale funzione in un secondo momento utilizzando un adattatore USB Bluetooth standard (per i prodotti GX dotati di Bluetooth integrato, vedere la panoramica della gamma Victron GX).
Tuttavia, un adattatore Bluetooth USB aggiuntivo, sempre per i dispositivi GX con Bluetooth integrato, consente uno spostamento limitato della radio Bluetooth (tramite una prolunga del cavo USB) per posizionarla vicino ad altri dispositivi Bluetooth supportati che altrimenti non sarebbero raggiungibili.
Nota per le unità Cerbo GX fino al numero di serie HQ2207 incluso: La connessione Bluetooth integrata viene disattivata quando la temperatura interna della CPU supera i 53 gradi C (influenzata dal carico e/o dalla temperatura ambiente). Per un funzionamento affidabile si deve utilizzare un adattatore Bluetooth USB. I dispositivi prodotti successivamente (HQ2208 e successivi) non richiedono un adattatore USB Bluetooth aggiuntivo. Tenere presente che questa limitazione non si applica al Cerbo-S GX.
Adattatori Bluetooth USB testati e garantiti per il funzionamento:
Adattatore Bluetooth USB | ||||
|---|---|---|---|---|
Insignia (NS-PCY5BMA2) | Logilink BT0037 | TP-Link UB400(UN) | Kinivo BTD-400 | Adattatore Ideapro USB bluetooth 4.0 |
Ewent EW1085R4 | Laird BT820 | Laird BT851 | - | - |
Un elenco di altri adattatori in fase di test, nonché di adattatori testati e ma che non funzionano, è disponibile qui: Comunità Victron.
5.8.1. Installazione

L'installazione del sensore Mopeka è molto semplice. Tuttavia, il sensore deve essere anzitutto installato secondo le istruzioni di installazione di Mopeka e configurato tramite l'app Mopeka Tank (disponibile in Google Play e Apple App Store). Poi l'installazione e la configurazione vengono eseguite nel dispositivo GX come descritto di seguito.
Assicurarsi che il Bluetooth sia attivato nel menù Sensori Bluetooth (attivo per difetto).
Entrare in Impostazioni → I/O → Menù Sensori Bluetooth.
Spostare il cursore Attiva verso destra per attivare i sensori Bluetooth.
Per trovare il sensore Mopeka, scorrere verso il basso fino a visualizzarlo.
Per attivare il sensore, spostare il cursore verso destra. A questo punto dovrebbe comparire nell'Elenco dei Dispositivi.
Ripetere i punti 1..5 per installare altri sensori.
5.8.2. Configurazione
Entrare nel menù Elenco dispositivi.
Scorrere verso l'alto o verso il basso e selezionare il sensore appropriato.
Premere il tasto freccia destra o la barra spaziatrice su quel sensore per aprire il menù Configurazione dello stesso.
Scorrere fino a Configurazione e premere nuovamente il tasto freccia destra o la barra spaziatrice per aprire il menù Configurazione dei sensori.
Nel menù Configurazione è possibile modificare la capacità del serbatoio, selezionare il tipo di liquido e l'unità di volume, impostare i valori di calibrazione per i livelli di serbatoio vuoto e pieno e leggere il valore effettivo del sensore.
Dopo aver completato la configurazione, tornare al menù Panoramica del sensore.
Scorrere verso il basso, selezionare Dispositivo e premere nuovamente il tasto freccia destra o la barra spaziatrice per aprire il menù delle impostazioni dei sensori.
Nel menù Dispositivo è possibile assegnare un nome personalizzato al sensore e leggere alcune informazioni aggiuntive sul dispositivo.
Ripetere i punti 1..8 se si desidera impostare altri sensori.

5.8.3. Monitoraggio del livello serbatoio
 |  |
I livelli dei serbatoi possono essere monitorati in vari punti dell'ambiente GX:
Elenco dispositivi del dispositivo GX
Menù di panoramica del sensore del dispositivo GX
Panoramica grafica del dispositivo GX
Dashboard del VRM
Widget del menù avanzato del VRM
Widget dell'app VRM
|  |
5.9. Sensori di temperatura Ruuvi Bluetooth wireless
Il sensore Ruuvi rileva temperatura, umidità e pressione atmosferica e le trasmette in modalità wireless al dispositivo GX tramite Bluetooth.
Per collegare i sensori Ruuvi al dispositivo GX tramite Bluetooth, il dispositivo GX deve essere dotato di funzionalità Bluetooth. Alcuni prodotti GX sono già dotati di Bluetooth integrato, mentre per tutti gli altri si può facilmente installare tale funzione in un secondo momento utilizzando un adattatore USB Bluetooth standard (per i prodotti GX dotati di Bluetooth integrato, vedere la panoramica della gamma Victron GX ).
Tuttavia, un adattatore Bluetooth USB aggiuntivo, sempre per i dispositivi GX con Bluetooth integrato, consente uno spostamento limitato della radio Bluetooth (tramite una prolunga del cavo USB) per posizionarla vicino ad altri dispositivi Bluetooth supportati che altrimenti non sarebbero raggiungibili.
Nota per le unità Cerbo GX fino al numero di serie HQ2207 incluso: La connessione Bluetooth integrata viene disattivata quando la temperatura interna della CPU supera i 53 gradi C (influenzata dal carico e/o dalla temperatura ambiente). Per un funzionamento affidabile si deve utilizzare un adattatore Bluetooth USB. I dispositivi prodotti successivamente (HQ2208 e successivi) non richiedono un adattatore USB Bluetooth aggiuntivo. Tenere presente che questa limitazione non si applica al Cerbo-S GX.
Adattatori Bluetooth USB esterni testati e garantiti per il funzionamento:
Adattatore Bluetooth USB | ||||
|---|---|---|---|---|
Insignia (NS-PCY5BMA2) | Logilink BT0037 | TP-Link UB400(UN) | Kinivo BTD-400 | Adattatore Bluetooth USB Ideapro 4.0 |
Ewent EW1085R4 | Laird BT820 | Laird BT851 | - | - |
Un elenco di altri adattatori in fase di test, nonché di adattatori testati e ma che non funzionano, è disponibile questa discussione della comunità.
Procedura di installazione
Assicurarsi che il Bluetooth si attivato nel menù del Bluetooth (attivo per difetto).
Accedere al menu Impostazioni → I/O → Sensori Bluetooth e cliccare su Attiva per attivare i sensori di temperatura Bluetooth.
I sensori Ruuvi hanno in dotazione una linguetta di plastica rimovibile. Tale linguetta serve a prevenire la scarica quando sono stoccati su un ripiano. Rimuovere la linguetta di plastica e l’unità inizia a trasmettere le informazioni sulla temperatura.

Il sensore deve apparire nel menù “Ruuvi ####” con un ID dispositivo di 4 cifre esadecimali: attivare il sensore Ruuvi desiderato.

Il sottomenu Adattatori Bluetooth visualizza un elenco degli adattatori Bluetooth disponibili. L'opzione menù Scansione continua esegue una scansione permanente dei nuovi sensori Bluetooth. Notare che questa opzione influisce sulle prestazioni WiFi del dispositivo GX. Attivare questa opzione solo se è necessario cercare nuovi sensori Bluetooth. Altrimenti, lasciare questa opzione disattivata.
 |  |
Se sono presenti vari sensori, si consiglia di scrivere a mano sul sensore questo ID dispositivo per aiutarsi a identificarli.
Il sensore ora dovrebbe essere visibile nel menù principale: per difetto è etichettato come “Sensore di temperatura generico (##)”.

Nel menù del sensore di temperatura è possibile regolare il tipo e anche impostare un nome personalizzato.
Durata e stato della batteria per i sensori Ruuvi:
I sensori Ruuvi utilizzano una pila a bottone al litio CR2477 da 3 V sostituibile, la cui durata è stimata in oltre 12 mesi, in base alla temperatura ambiente.
Informazioni sulla batteria:
La tensione e lo stato interni della batteria sono visualizzati nel menu del sensore.
Indicatori di stato della batteria:
Stato OK: Tensione batteria ≥ 2,50 V
Batteria del sensore scarica: Tensione batteria ≤ 2,50 V
Avviso di batteria scarica:
Sulla Consolle Remota appare un avviso di batteria scarica. Se il dispositivo GX riferisce al VRM, l'avviso apparirà anche lì.
La soglia di avviso dipende dalla temperatura:
Al di sotto dei 20 °C: La soglia è di 2,0 V
Tra -20 °C e 0 °C: La soglia è di 2,3 V
Al di sopra dei 20 °C: La soglia è di 2,5 V

È possibile aggiornare il firmware del Ruuvi grazie alla sua app per cellulare, ma non sarà necessario se non si verificano problemi.
5.10. Collegamento ai sensori di Irradiazione Solare IMT, Temperatura e vento
Ingenieurbüro Mencke e Tegtmeyer GmbH (IMT) offrono una gamma di modelli di sensori digitali di irraggiamento al silicio della serie Si-RS485, tutti compatibili con un dispositivo Victron GX.
Compatibilità
Sono supportati anche i sensori opzionali/aggiuntivi della temperatura del modulo esterno, della temperatura ambiente e della velocità del vento.
I sensori esterni opzionali/aggiuntivi si collegano al sensore di irraggiamento solare, mediante una presa pre-installata, oppure sono pre-cablati al sensore di irraggiamento solare (solamente temperatura del modulo esterno e ambiente). Se i sensori esterni sono collegati tramite un adeguato sensore di irraggiamento solare, tutti i dati delle misurazioni vengono trasmessi al dispositivo GX di Victron mediante il solo cavo interfaccia.
Ogni modello di sensore di irraggiamento solare della serie Si-RS485 possiede una capacità diversa, rispetto ai sensori esterni (oppure ha un sensore esterno pre-cablato), pertanto soppesare accuratamente i possibili desideri/requisiti futuri, prima di procedere all’acquisto.
È possibile collegare anche un sensore di temperatura del modulo IMT Tm-RS485-MB (visibile come “temperatura cella”) o un sensore di temperatura ambiente IMT Ta-ext-RS485-MB (visibile come “temperatura esterna”) indipendenti, direttamente al dispositivo GX di Victron, senza sensore di irradiazione solare o in aggiunta a uno preesistente.
Funzionamento
La serie di sensori di irraggiamento solare IMT Si-RS485 utilizza un’interfaccia elettrica RS485 e un protocollo di comunicazione Modbus RTU.
Il dispositivo GX Victron deve avere la versione 2.40 o più recente.
Sono supportati i sensori IMT con versioni del firmware precedenti alla v1.53; per ulteriori informazioni, contattare IMT.
La connessione fisica al dispositivo GX di Victron si esegue tramite porta USB e richiede un cavo di interfaccia RS485 a USB di Victron.
È necessaria anche un’adeguata fonte di alimentazione CC esterna (da 12 a 28 VCC), giacché il sensore NON è alimentato tramite USB.
I modelli IMT più recenti dispongono di un secondo sensore di temperatura, anch'esso supportato.
Connessioni dei cavi
Lo schema riportato nella guida di installazione mostra la configurazione dei cavi in un impianto tipico.
 |
Connessioni dei cavi
Si-Sensor | Interfaccia RS485 a USB di Victron | Segnale |
|---|---|---|
Marrone | Arancione | RS485 Data A + |
Arancione | Giallo | RS485 Data B - |
Rosso | - | Alimentazione Pos: da 12 a 28 VCC |
Nero | Alimentazione Neg/Gnd - 0 VCC | |
Nero (spesso) | - | Terra/Schermo Cavo/PE |
- | Rosso | Alimentazione Pos: 5 VCC (non utilizzato) |
- | Nero | Alimentazione Neg/Gnd - 0 VCC (non utilizzato) |
Marrone | Terminatore 1: 120R (non utilizzato) | |
Verde | Terminatore 2: 120R (non utilizzato) |
Note di Installazione
La tensione massima di alimentazione CC consentita per la gamma di sensori di irraggiamento solare IMT della serie Si-RS485 è di 28,0 VCC, di conseguenza, per i banchi/sistemi di batterie da 24 V e 48 V è necessario utilizzare un convertitore CC-CC Victron appropriato (24/12, 24/24, 48/12 o 48/24) o un adattatore CA-CC per l’installazione.
Per i banchi batterie/sistemi da 12 V, la gamma di sensori di irraggiamento solare serie Si-RS485 IMT deve essere alimentata direttamente dal banco batterie e continuerà a funzionare fino a una tensione minima di 10,5 V (misurati nel sensore, rispondono per la caduta di tensione nel cavo).
Per vedere le note e specifiche particolareggiate di cablaggio/installazione, consultare la “Guida di Riferimento Rapido” dei sensori di irraggiamento solare della serie IMT Si-RS485 e le “Schede Tecniche” del cavo di interfaccia RS485 a USB di Victron.
Per garantire l’integrità del segnale e un funzionamento solido, assicurarsi specificamente che:
L’estensione dei cavi rispetti le specifiche di sezione minima, riportate nella summenzionata tabella, in base alla tensione di alimentazione CC e alla lunghezza del cavo
L’estensione dei cavi possieda un’adeguata schermatura e un nucleo a doppino ritorto
Il cavo originale, attaccato all’interfaccia RS485 a USB di Victron, abbia una lunghezza massima limitata a 20 cm, per gli impianti nei quali la lunghezza totale del cavo è superiore a 10 m o nei quali sono presenti specifici problemi di interferenze nell’impianto/sito: in quest’ultimo caso si devono usare cavi idonei/di alta qualità per l’intera lunghezza del cavo, piuttosto che solamente per la lunghezza dell’estensione
I cavi siano installati separatamente/lontano dai principali cavi di alimentazione CC o CA
Tutti i cavi siano opportunamente terminati (compresi quelli che non si usano) e opportunamente isolati dall’ingresso di agenti atmosferici/acqua
La carcassa del sensore non sia aperta o manomessa durante l’installazione, giacché l’integrità della sigillatura potrebbe risultare compromessa (e si annullerebbe la garanzia)
Il sensore di irraggiamento solare della serie Si-RS485TC IMT comprenda un Isolamento Galvanico interno (fino a 1000 V) tra l’alimentazione e i circuiti Modbus RS485 e, di conseguenza, l’interfaccia non isolata RS485 a USB di Victron sia indicata per la maggior parte degli impianti.
Tuttavia, se si preferisce un’interfaccia isolata RS485 a USB, l’unico dispositivo compatibile è il USB485-STIXL di Hjelmslund Electronics (qualsiasi altro tipo non sarà riconosciuto dal dispositivo GX).
Sensori Multipli
È possibile collegare vari sensori di irraggiamento solare della serie Si-RS485 IMT a un comune dispositivo GX di Victron, sebbene sia necessaria un’interfaccia dedicata RS485 a USB di Victron per ogni singola unità.
Le unità multiple non possono essere combinate in una sola interfaccia (giacché tale combinazione non è supportata dal relativo software Venus OS).
Configurazione
Generalmente, non è necessaria alcuna configurazione speciale/aggiuntiva: la configurazione predefinita “di fabbrica” è compatibile per la comunicazione con un dispositivo GX di Victron.
Tuttavia, nei casi in cui il sensore di irraggiamento solare della serie Si-RS485 IMT sia stato previamente utilizzato in un altro sistema e/o le impostazioni siano cambiate per qualsiasi motivo, è necessario ripristinare la configurazione predefinita prima di utilizzarlo.
Per verificare la configurazione, scaricare lo “Strumento per la configurazione del software Si-MODBUS” di IMT. Seguire le istruzioni nella “Documentazione del Configuratore Si-Modbus” di IMT e verificare/aggiornare le seguenti impostazioni:
Indirizzo Modbus: 1
Velocità di trasmissione (in Baud): 9600
Formato Dati: 8N1 (10 Bit)
Per un’ulteriore assistenza relativamente alla configurazione dei sensori di irraggiamento solare della serie Si-RS485 IMT, si prega di rivolgersi direttamente a IMT Solar.
Interfaccia utente - Dispositivo GX
Dopo averlo collegato al dispositivo GX di Victron e averlo alimentato, il sensore di irraggiamento solare della serie Si-RS485 IMT sarà automaticamente rilevato in pochi minuti e apparirà nel menù “Elenco dispositivi”.
Nel menù “Sensore di irraggiamento solare Serie Si-RS485 IMT” saranno visualizzati automaticamente tutti i parametri disponibili (in base ai sensori collegati) e gli aggiornamenti in tempo reale.
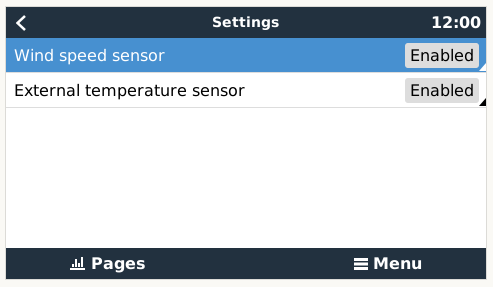
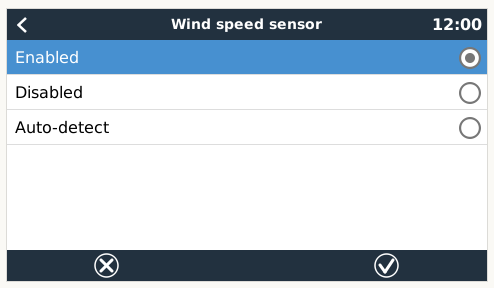
Nel sottomenù “Impostazioni”, è possibile attivare e disattivare manualmente qualsiasi sensore esterno opzionale/aggiuntivo, collegato al sensore di irraggiamento solare serie Si-RS485 IMT.
 |  |
5.10.1. Visualizzazione dei Dati - VRM
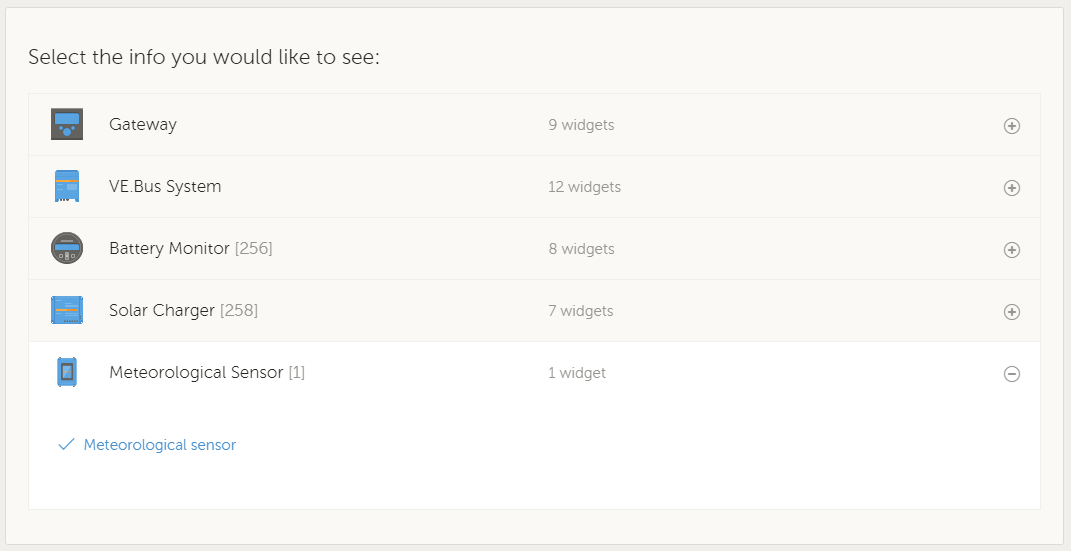
Per controllare i dati registrati della cronologia nel portale VRM, espandere l’elenco dei widget “Sensore Meteorologico” e selezionare il widget “Sensore Meteorologico”.
 |
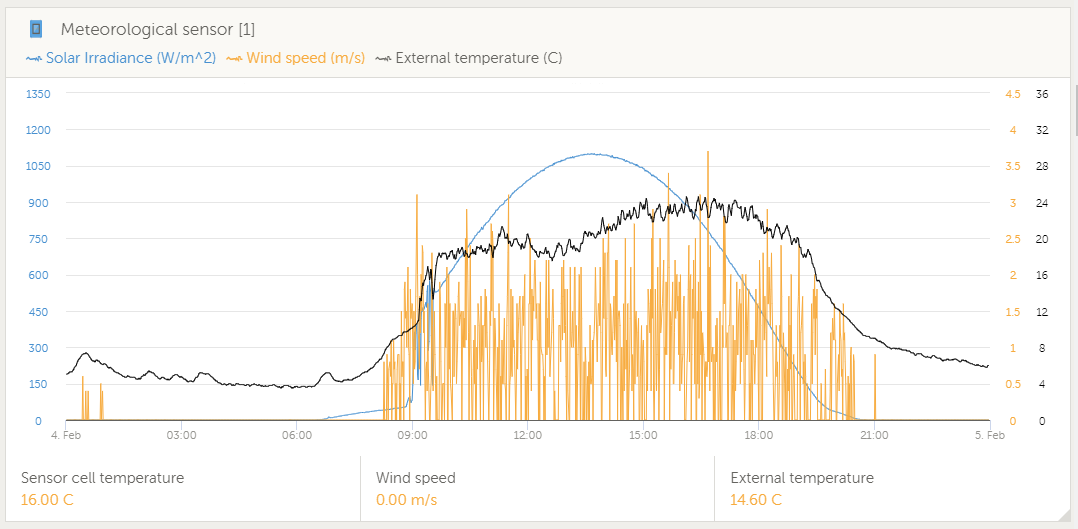
Nel grafico appariranno automaticamente i dati di tutti i tipi di sensori disponibili. Singoli sensori/parametri possono anche essere attivati/disattivati cliccando sul nome/didascalia del sensore.
 |
5.11. Assistenza per il controllore del generatore InteliLite serie 4 di ComAp
Per informazioni dettagliate, vedere qui .
5.12. DSE - Assistenza per il controllore del generatore di Deep Sea
Per informazioni dettagliate, vedere qui .
5.13. Lettura di dati generici dell'alternatore da sensori NMEA 2000 DC compatibili
Il Venus OS supporta i sensori NMEA 2000 DC che possono essere utilizzati per leggere la tensione, la corrente e la temperatura dell'alternatore da un alternatore generico. Si noti che i dati vengono solo visualizzati, ma non vengono utilizzati per ulteriori calcoli o funzioni.
I sensori NMEA 2000 DC di terze parti devono soddisfare i seguenti requisiti:
La classe del dispositivo NMEA 2000 deve essere 35 Generazione elettrica.
La funzione del dispositivo NMEA 2000 deve essere 141 Generatore CC.
Il tipo CC deve essere impostato su alternatore nei Dettagli CC del PGN 127506.
Tensione, corrente e temperatura devono essere trasmesse allo Stato batteria del PGN 127508.
Dovrebbe funzionare la maggior parte dei sensori NMEA 2000 DC.
La compatibilità è stata testata mediante:
Per collegare una rete NMEA 2000 alla porta VE.Can del dispositivo GX, entrambe con connettori di tipo diverso, esistono due soluzioni:
Il cavo VE.Can a NMEA 2000. Inserendo o meno il fusibile, permette di alimentare o meno la rete NMEA 2000 tramite apparecchiature Victron o meno. Tenere presente la seguente avvertenza.
L’Adattatore VE.Can 3802 di OSUKL. Il suo vantaggio è che si presta bene a collegare un solo dispositivo NMEA 2000, come un trasmettitore del serbatoio, a una rete VE.Can. Può anche alimentare una rete NMEA 2000 con una tensione inferiore, direttamente da un sistema Victron a 48 V.
Avvisi e soluzioni per sistemi a 24 V e 48 V
Mentre tutti i componenti Victron accettano fino a 70 V in ingresso per le loro connessioni CAN-bus, alcune apparecchiature NMEA 2000 non accettano tale ingresso e richiedono una connessione NMEA 2000 alimentata a 12 V che a volte arriva fino a 30 o 36 V. Assicurarsi di leggere le schede tecniche di tutte le apparecchiature NMEA 2000 utilizzate. Se il sistema contiene una NMEA 2000 che richiede una tensione di rete inferiore a quella della batteria, consultare l'adattatore 3802 VE.Can di OSUKL già menzionato o, in alternativa, installare il cavo VE.Can a NMEA 2000 senza fusibile e fornire un'alimentazione adeguata alla rete NMEA 2000 utilizzando, ad esempio, un cavo adattatore di alimentazione NMEA 2000, non fornito da Victron. La porta VE.Can del dispositivo GX non necessita di alimentazione esterna per funzionare.
5.13.1. Supporto del regolatore dell'alternatore Wakespeed WS500
Introduzione
Il WS500 è un regolatore intelligente esterno dell’alternatore con comunicazione CAN-bus e NMEA 2000, particolarmente adatto alle applicazioni Nautiche e ai camper. Il Wakespeed WS500 è supportato da Venus OS e offre la possibilità di monitorare le prestazioni degli alternatori tramite un dispositivo GX.
Requisiti
I requisiti necessari per l'integrazione del WS500 sono:
Firmware VenusOS v2.90 o superiore installato nel dispositivo GX
Firmware Wakespeed WS500 2.5.0 o superiore installato nel controllore WS500
Il WS500 deve collegarsi alla porta VE.Can del dispositivo GX. Non è possibile monitorare il WS500 quando è collegato alla porta BMS-Can di un Cerbo GX.
Cablaggio del WS500 a VE.Can
Entrambi, WS500 e VE.Can, utilizzano connettori RJ45 per le porte CAN.
Tuttavia, entrambi hanno pin out diversi. Ciò significa che non è possibile utilizzare un normale cavo di rete (cavo UTP diritto). È necessario un cavo incrociato. Tale cavo incrociato deve essere fai-da-te. Il diagramma seguente riflette il pin out dei due dispositivi.

I pin importanti da controllare sono il pin 7 e il pin 8 per CAN-H e CAN-L sul lato VE.Can e i pin 1 e 2 per Can-H e CAN-L sul lato WS500.
È quindi necessario un cavo i cui pin 1 e 2 di un lato siano collegati ai pin 7 e 8 dell'altro lato. Il pin 7 va al pin 1 e il pin 8 al pin 2.
Il connettore RJ45 con i pin 7 e 8 su un'estremità si collega alla porta VE.Can del dispositivo GX. L'altra estremità del cavo con i pin 1 e 2 si collega al controllore WS500. Entrambe le parti devono essere terminate.
I colori del cavo non sono importanti per il cavo fai-da-te. Wakespeed offre anche un cavo pronto per la configurazione con un connettore RJ45 blu a un'estremità che deve essere collegato alla porta VE.Can.
Nota
Tenere presente che i terminali neri forniti da Wakespeed e quelli blu forniti da Victron non sono intercambiabili. Pertanto: inserire il terminatore Victron sul lato Victron della rete e inserire il terminatore Wakespeed nel Wakespeed.
Esempio di cablaggio
L'esempio seguente mostra una panoramica del cablaggio consigliato in base a un impianto formato da un Lynx Smart BMS, distributori Lynx e un Cerbo GX.
Il corretto posizionamento dello shunt dell'alternatore (da non confondere con lo shunt del BMV o lo SmartShunt) è importante per il corretto collegamento del filo di rilevamento della corrente.
Per il cablaggio completo tra WS500 e alternatore, consultare il manuale del WS500 e dell'alternatore.

Interfaccia utente del dispositivo GX per WS500
Dopo aver collegato il WS500 al dispositivo GX, l'elenco dei dispositivi contiene una voce per il regolatore.
Il menù del WS500 fornisce quindi le informazioni e i dati seguenti:
Uscita: tensione, corrente e potenza come riportate dal regolatore dell'alternatore
Temperatura: la temperatura dell'alternatore misurata dal sensore di temperatura del WS500
Stato: lo stato di carica del WS500
Spento quando non è in carica
Bulk, Assorbimento o Mantenimento quando il WS500 utilizza il proprio algoritmo di carica
Controllo esterno quando è controllato da un BMS come il Lynx Smart BMS
Stato della Rete
Autonomo, se il regolatore lavora per conto proprio
Master del Gruppo, quando sta fornendo target di carica a un altro dispositivo WS500
Slave, quando riceve le indicazioni di ricarica da un altro dispositivo, come un WS500 o un BMS
Errore: indica qualsiasi stato di errore in cui potrebbe trovarsi il WS500. I dettagli di tutti i codici di errore e dei messaggi si trovano nella Guida alla configurazione e alle comunicazioni di Wakespeed. Vedere anche l'appendice per l'errore #91 e l'errore #92
Azionamento di campo: rapporto sulla percentuale di azionamento di campo inviato dal WS500 all'alternatore sul collegamento di campo
Velocità: la velocità in giri/minuto a cui gira l'alternatore. Questo è quanto riportato dall'alimentazione dello statore e, se erroneo, può essere regolato impostando l'opzione Alt Poles nella linea di configurazione del Wakespeed SCT
Velocità del motore: indicata in giri/minuto. Questo viene segnalato dal
calcolo basato sulla velocità dell'alternatore e sul rapporto di trasmissione Eng/Alt impostato dalla linea di configurazione SCT
NMEA 2000, se il WS500 riceve i giri del motore da PGN127488
J1939, se il WS500 riceve il numero di giri del motore da PGN61444
Nel menù dispositivo è anche possibile creare un nome personalizzato del WS500. In questo modo il WS500 aggiorna la linea di configurazione $SCN del regolatore.
 |  |  |
Dati WS500 nel portale VRM
I dati WS500 che possono essere visualizzati nel nostro portale VRM sono corrente, tensione e temperatura.

Attualmente sono disponibili 3 widget nel VRM
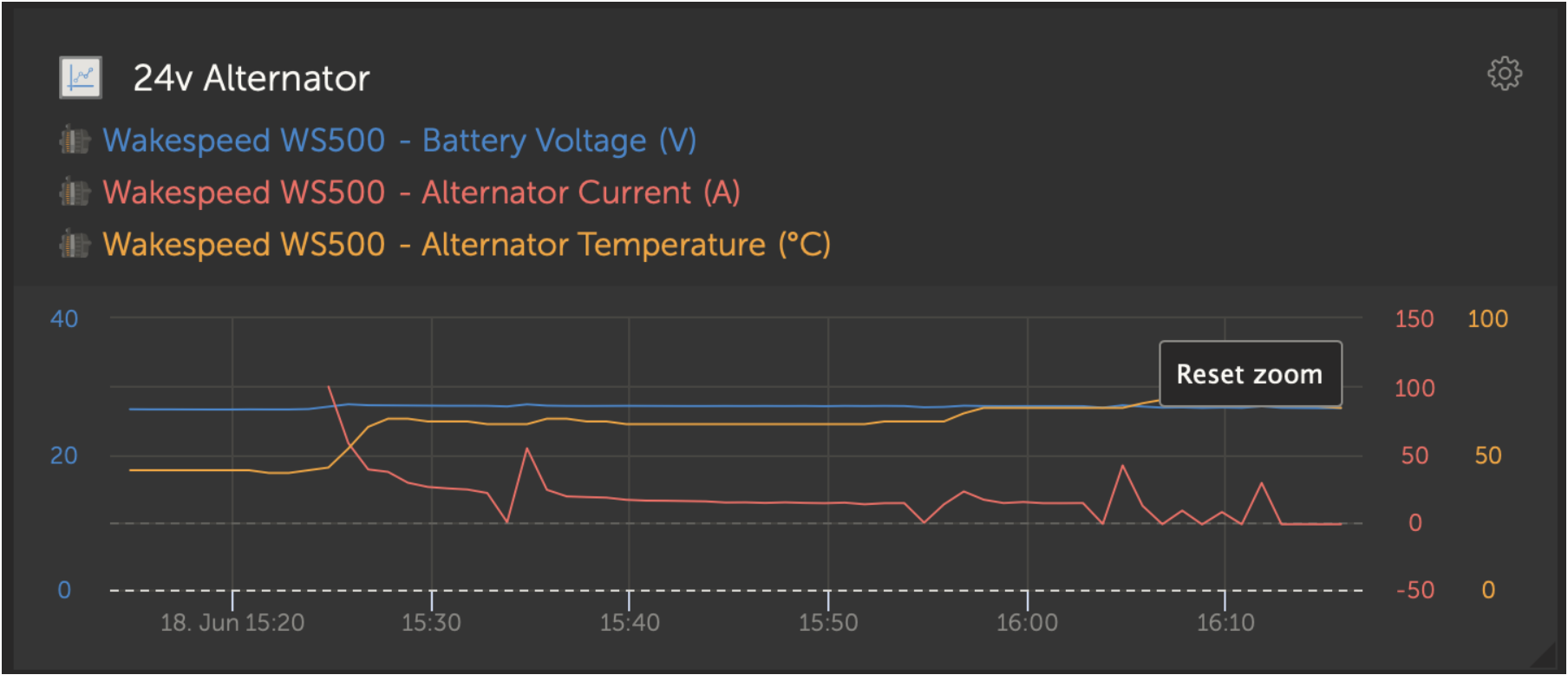
Widget personalizzato VRM che mostra tensione, corrente e temperatura del WS500
Risoluzione dei problemi e FAQ
Per ulteriore assistenza e risoluzione dei problemi, si prega di contattare direttamente il supporto Wakespeed.
Codice di errore #91 e #92
Venus OS segnalerà tutti gli errori che possono essere generati dal WS500 come definiti nella Guida delle comunicazioni e della configurazione di Wakespeed. Nei sistemi con BMS integrato, i seguenti errori sono critici finché gli eventi sono attivi e richiedono particolare attenzione.
#91: Lost connection with BMS
Il WS500 ha perso la comunicazione con il BMS e passerà alla modalità di rientro configurata. Non appena viene ripristinata la comunicazione con il BMS, il sistema torna a seguire gli obiettivi di carica impostati dal BMS.
#92: ATC disabled through feature IN
Il BMS ha segnalato un evento di disconnessione della carica tramite la funzione cavo e il WS500 è quindi passato allo stato Off.
I dati relativi alla corrente e alla potenza non vengono visualizzati nel menu del dispositivo del WS500
Non costituisce un problema e si riferisce semplicemente al modo in cui il sistema è stato installato e previsto.
Non sono installati shunt dell'alternatore[1]
Shunt dell'alternatore installato ma non configurato correttamente. Controllare l'impostazione ShuntAtBat e l'impostazione Ignora Sensore utilizzando gli strumenti di configurazione Wakespeed.
[1] Lo shunt dell'alternatore è uno shunt che può essere installato in serie con l'alternatore per fornire una lettura della corrente e della potenza di uscita di quest’ultimo. Il suo cablaggio di rilevamento si collega direttamente al WS500. Si tratta di una caratteristica opzionale che serve solo per la visualizzazione. Se lo shunt non è installato, il dispositivo GX mostrerà altri dati dell'alternatore, come la percentuale di campo, la tensione di uscita e così via, ma non la corrente e la potenza di uscita.
FAQ
D1: La corrente di uscita dell'alternatore (se effettivamente misurata) viene utilizzata anche per altri fini, oltre alla semplice visualizzazione?
R1: Per il momento si utilizza solo a scopi di visualizzazione. Forse in futuro uscirà un'integrazione DVCC, che permetterà al dispositivo GX di controllare la quantità di corrente che si desidera generi il WS500, per poi dividere la corrente di carica desiderata tra il WS500 e, ad esempio, gli MPPT.
D2: A cosa serve la corrente di uscita della batteria e può essere letta sul CAN-bus da un Lynx Smart BMS, da altri monitor della batteria o anche da un dispositivo GX?
A2: Sì, la corrente può essere letta tramite CAN-bus e Lynx Smart BMS.
In questo caso, lo shunt del WS500 può essere configurato per l'alternatore e quindi riportare la quantità di corrente prodotta dallo stesso. La corrente del Lynx Smart BMS viene utilizzata dal WS500 per garantire che nella batteria non ne venga immessa più di quella necessaria. Quindi, se la batteria richiede 100 A e il WS500 segnala 200 A all'alternatore, 100 A saranno utilizzati per supportare i carichi. Offre un calcolo del carico CC notevolmente migliorato.
D3: Se il sistema comprende un Lynx Smart BMS, esistono raccomandazioni per il cablaggio?
A3: Sì. Abbiamo creato esaustivi esempi di sistema che mostrano il cablaggio completo e sono stati integrati con importanti informazioni aggiuntive. Ad esempio, un sistema per catamarano con due WS500 o un sistema dotato di un alternatore supplementare controllato da un WS500. Tali esempi possono essere utilizzati come base per il proprio sistema.
Questi esempi di sistema possono essere scaricati dalla pagina del prodotto del Lynx Smart BMS.
D4: Se il sistema non comprende un Lynx Smart BMS, come si consiglia di effettuare il cablaggio?
A4: Wakespeed fornisce una guida rapida che mostra come configurare il regolatore tramite interruttori DIP e una panoramica di tutti i collegamenti di cablaggio riguardanti l’insieme dei cavi forniti con l'unità.
Il manuale del prodotto WS500 contiene ulteriori schemi di cablaggio che mostrano in dettaglio come cablare tali cavi.
Tenere conto che lo shunt deve essere collegato alla batteria e il WS500 deve essere configurato assieme allo shunt nella batteria.